3rd person camera
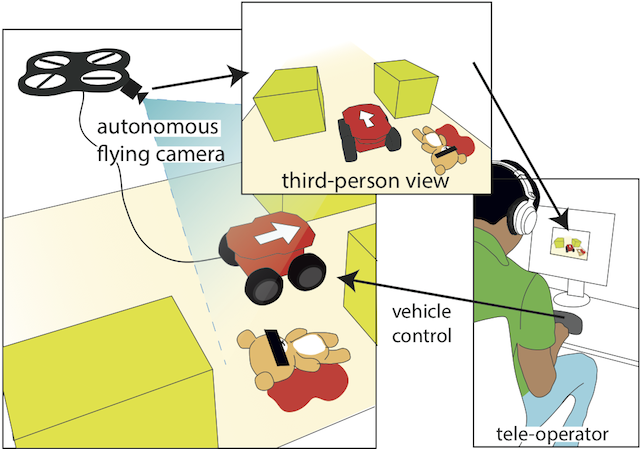
Navigating remote robots and providing awareness of the remote environment is essential in many teleoperated tasks. An external view on the remote robot, a bird’s eye view, is thought to improve operator performance.
We explore a novel designs for providing such a third-person view for a ground vehicle using a dynamic, external camera mounted on a quadcopter. Compared to earlier methods that use 3D reconstruction to create third-person views, the benefit of our approach is a true third-person view through a video feed. We so provide visually rich, live information to the operator.

In an experiment simulating a search and rescue mission in a simplified environment, we compared our proposed design to a pole-mounted camera and to a traditional front-mounted camera. The third-person perspective provided by our flying camera and pole-mounted camera resulted in fewer collisions and more victims being located, compared to the front-mounted camera.
Currently we present simple thethered flying cameras. Future work will include balloon mounted camera for indoor scenarios and extended functionality such as look around and scout.
Paper
Saakes, D.P., Choudhary, V., Sakamoto, D., Inami, M., Igarashi, T., A Teleoperating Interface for Ground Vehicles using Autonomous Flying Cameras. In ICAT 2013: The 23rd International Conference on Artificial Reality and Telexistence, Dec 2013. Best Paper Award
Team
Daniel Saakes, Vipul Choudhary, Daisuke Sakamoto, Masahiko Inami and Takeo Igarashi. Thanks to Yoshimasa Furukawa and Koki Toda.